Interaktion
Ein Projekt in 4 Modulen
Apollo
Bei diesem Projekt wurden wir anfangs von einem Spezialisten aus dem Gebiet der Roboterforschung unterstützt. Er zeigte uns, wie man das Grundgerüst eines Roboters aufbaut, also wie man unter anderem einen Schaltkreis entwirft und anfertigt.
Zusätzlich zu den zwei Motoren haben wir auch noch zwei Lichtsensoren eingebaut, die es ermöglichen, dass der Roboter später auf Lichtquellen, beziehungsweiße auf Dunkelheit reagiert.
Ausgehend von der daraus entstandenen Konstruktion beschäftigten wir uns weitergehend mit der äußeren Gestaltung.
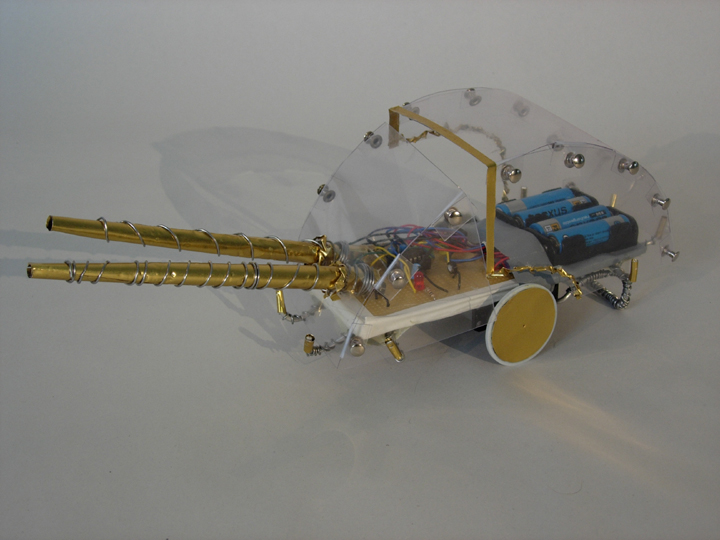
Damit das Licht konzentrierter auf die beiden Lichtsensoren fällt, haben wir zwei Fühler hinzugefügt, die dies ermöglichen sollen. Da eine Schnecke ebenso über ihre Fühler wahrnimmt, war uns klar, dass unser Roboter die Form einer solchen erhalten wird.
Da die Ausführung dieses Vorhabens jedoch nicht so glückte, wie wir es uns erwartet hatten, mussten wir unsere ursprüngliche Idee ändern. Unser Körper wurde stark abstrahiert und die Fühler übernahmen die Funktion der Koordination.
Für den Bau des Körpers wählten wir ein durchsichtiges Material aus, sodass die Lichtstrahlen, auf die der Roboter schlussendlich reagiert, zu den jeweiligen Sensoren durchdringen können.
Ein Teil dieses Körpers ist abnehmbar, sodass man jeder Zeit die Batterien austauschen und den „Jumper“ anstecken und wieder abnehmen kann.
Die goldenen Verzierungen am ganzen Roboter sollen das Licht reflektieren und das glorreiche des Sonnengottes Apollo ansprechen.
Am Ende reagiert unser Roboter Apollo auf Licht, indem er sich im Kreis dreht, als würde er dem Licht folgen. Auf Schatten reagiert er durch konfuses Umherdrehen, als würde er etwas Bestimmtes suchen (etwa Licht?).